�o�h�b���ꂱ��Ǝ��s�k �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@All rights reserved JA3OOK ���� ���a �@PIC�𗘗p�����@��삷��ɓ������Ă̗v�_���܂Ƃ߂܂����B���̌o�������S�ł�����Ɉꕔ �̂��ƂɂȂ�܂��B�����g�̃����ł����N���̖��ɗ��ĂK���ł��B �@�@�@�ڎ� '14/07/14�@�P�D�Ȃ��o�h�b��I���@ '14/07/14�@�Q�D�����PIC16F88��I���R�@ '14/07/14�@�R�D�J���������ɂ��邩�@ '14/07/14�@�S�D�k�b�c�̋P�x�����̂u�q�͒�߂ɁI�@�}�j���A���̊ԈႢ������I�@ '14/07/14�@�T�D�X�g�b�v�r�b�g���@one or two stop bits�@ '14/07/14�@�U�DPIC�֍ď������݂��ł��Ȃ��g���u���@ '14/12/15�@�V�DPICkit3��PIC��F�����Ȃ��g���u���iMPLAB X IDE v2.10 PICkit3�j�@ '14/12/15�@�W�DPIC18F25K22��64MHz�@ '14/12/15�@�X�DLAT���W�X�^�[�iPIC16����PIC18�ւ̈ڍs���j�@ '14/12/15�@10�DPIC18F25K22��EUSART�W�̃��W�X�^���@ '14/12/15�@11. EUSART�������Ȃ��iPIC18F2550����PIC18F25K22�ւ̈ڍs���AANSEL��㩁j�@ '14/12/15�@12�DEEPROM �g�p��̒����@ '15/01/03�@13�DWDT(�E�H�b�`�h�b�O�^�C�}�[) �g�p��̒����@ '15/02/25�@14�DPIC18F25K22��PIC16F1936�̎�M�G���[�����@ '15/04/09�@15�D�o�C�i���[�G�f�B�^�[�@ '16/02/03�@16�DIDE��xc8�R���p�C���[���o�[�W�����A�b�v������EEPROM�ɃA�N�Z�X�ł��Ȃ��Ȃ����@ '17/05/23�@17�DIDE��xc8�R���p�C���[���o�[�W�����A�b�v������EEPROM�Ɋւ��ăR���p�C���G���[�ɂȂ��@ '17/05/23�@18�Dxc8�R���p�C���[��Warning level �̕ύX�@ '17/05/23�@19�DPICkit3 VDD�d��������VDD�d���w��ɗ����@ '17/05/23�@20�D�R�����g�E�[���@�����u�\�v�@���ƃR���p�C���G���[�ɂȂ�@������Microchip�ЂɊW�Ȃ��@ '17/05/26�@21�DMPLAB X IPE ���g����HEX�t�@�C�������������@ '17/08/29�@22�DPIC�̒����d��/�ȓd�͂̕��@�@ �P�D�Ȃ��o�h�b��I���@'14/07/14 �@�@���͑S���̂l�b�t�i�}�C�N���R���s���[�^�[�j�̏��S�ҁB�N���u���ԂŃ��C���C�G�k������v �@���������Ă��������ɂl�b�t�ɂ͂������̃��[�J�[�����邱�Ƃ�m��A�܂����̈Ⴂ���G�c �@�ɔc�����邱�Ƃ���n�߂��B �@�@�EAVR �@�@�@�@�ڂ��������͑唼���p���B�������R���s���[�^��ʐM�̉p���ł���Ȃ�Ƃ������ł���͂��B �@�@�@�@Web�ł̎���������Ă��Ă���l�q�B�f�r���[���V����PIC���A�[�L�e�N�`������������ �@�@�@�@�Ă���炵���B�J���c�[�������v�B �@�@�EH8 �@�@�@�@�S�Ă̎��������{��B����͐S�����B�J���c�[�������F�Ȃ��BWeb�ł̎���������B �@�@�@�@PIC��AVR���IO��������RAM/ROM�̗e�ʂ��傫���B��K�͗̈悪�^�[�Q�b�g�̂悤���B �@�@�@�@�����Y��MCU�B�S��I�ɂ͎g�������B �@�@�EPIC �@�@�@�@Web�Ŏ���̋L���������BPIC�ŗL�̎g���ɂ������w�E���Ă�����X�������邪�b�őg�� �@�@�@�@�Ό�����݉B����Ďg���ɂ����͊����Ȃ��͂��B �@�@�@�@�i����͗\�z�Ƃ���ł������B�`�a�r�̋@�\����������͈͂����̂��Ƃ����E�E�E�j �@�@�@�@�ڂ��������͑唼���p���B�������R���s���[�^��ʐM�̉p���ł���Ȃ�Ƃ��Ȃ�͂��B �@�@�@�@���ߎ�� �@�@�@�@�@�E�Ethernet�R���g���[������CPU�{�[�h/KBC-P18LAN2�����������A �@�@�@�@�@�E��V�o�h�b�|�m�h�b�L�b�g����H������ �@�@�@�@��������Ă��邱�ƁB������͍w�����ăJ�X�^�}�C�Y���Ă݂����B���̂��߂ɂ�PIC�Ɋ��� �@�@�@�@�Ă��������B �Q�D�����PIC16F88��I���R�@'14/07/14 �@�@���̍ŏ��̊J���ڕW��RS-232C�ł�PC�Ƃ̒ʐM�B���S�Ҍ����ɁARS-232C�d���ϊ��h�b���t���� �@�@�L�b�g���H������̔�����Ă������ƁB �@�@�@�iK-01714�@�o�h�b�P�U�e�W�W�@�b�o�t�{�[�h���W���[���L�b�g�@�u�����D�Q�@1,130�~�j �@�@������Web�ɂ�88�ł̐�������k�������������B����Ō��ʓI��PIC16F88�ɂȂ����B �@�@�l�b�t���̌��̎��ɂƂ��Ď育��̂悤�Ɏv���A�������\���s�����Ă������芷������� �@�@�����̂��Ƃƍl�����B �@�@���c�t�����K�v�ȃs���Ԋu���d�v�ȑI��v�f�B���̃L�b�g�ł͂P�^�P�O�C���`�ł������B �@�@�ׂ��ȕ������邱�Ƃ����ɂȂ��Ă��鎄�ɂ͂��ꂪ���x�B����ł����ዾ��J��������O�� �@�@���ʃ����Y���K�v�ȏꍇ������B �R�D�J���������ɂ��邩�@'14/07/14 �@�@����������������ɂȂ�̂ŁA���i���ێ炵�Ă��ꂽ��V���i�ɑΉ����Ă���鐻�i���g�� �@�@�����B����~�̍��Ȃ烁�[�J�[���������U�@�B �@�@�قƂ�ǂ̊J�����������BC��Optimize�@�\���]���ɂ���Ζ����B �@�@�iOptimize�@�\�F���ʂȏ���������[�������č�������ŏ������s���Ă����@�\�A�ɗ� �@�@�@��Ȃ���Ȃ�Ȃ��قǕ��G�ȃv���O�����ɂȂ�Ƃ͎v���Ȃ��j �@�@�Ƃ������Ƃō\�z�����J������ �@�@�@�EMPLAB X IDE v2.10 (Microchip) �@�@�@�EMPLAB XC8 C Compiler Free mode v1.31 (Microchip) �@�@�@�EPICkit2 v2.61.00 (Microchip) �{ �������݃A�_�v�^(�H�� K-05355�j �@�@C��I�i�A�b�Z���u���łȂ��j���R�B �@�@�@�EC����͍ł����y���Ă���v���O���~���O����̈�B �@�@�@�@����XC8 C��ISO��ANSI�ɏ������Ă���Ƃ̂��ƂŁA���������[�J�[�̂l�b�t�ɏ�芷���� �@�@�@�@���ƂɂȂ��Ă��y�������B�\�[�X�v���O�����݊��͊��҂ł��Ȃ����m�E�n�E�͎g����B �@�@�@�EWeb��ǂނ�PIC�̎�_�������Ă�����X�����邪�AC�Ȃ�MCU�̎�_����݉B����Ă��Ďg �@�@�@�@���ɂ����Ȃ��͂��B �@�@�@�E�A�b�Z���u���[�����̔N��i�P�X�S�T�N���܂�j�Ŋo����̂͂炢���A�����o����Ȃ� �@�@�@�@���p�͈͂��L��������o����ׂ��B �@�@�@�E�Ⴂ�Ƃ��d���Ŏg���Ă����r�x�r�k��g�o�k�Ƃb�͎��Ă���̂ŗ��������������B �@�@�@�@�@�r�x�r�k�@�F�@�d�d���Ёi���m�s�s�j�̂c�h�o�r�p�V�X�e���L�q���� �@�@�@�@�@�g�o�k�@�@�F�@�m�d�b�̃V�X�e���L�q���� �@�@�@�@�@�i�Ƃ茾�E�E�E���������Ȃ��j �@�@�@�@�Ȃ��A�}�V�����A�Z���u���[�̌���o��������A�R���p�C���[�̐���o��������̂� �@�@�@�@�}�C�N���R���s���[�^�[�̐��E�Ɉ�a�����Ȃ��̂̓��b�L�[�B �@�@PICkit2�ɂ��āB �@�@�@�EPICkit2��PICkit3���r����PICkit2�̕����ǂ��Ƃ�Web�̋L���Ɉ������PICkit2���w���� �@�@�@�@���B����������͑I���~�X�BPICkit2�̕����ǂ��Ƃ����̂͂����Ɛ̘̂b�������̂��B �@�@�@�@���i2014�N�j�Ȃ�PICkit3���w�����ׂ��ł������B�ƌ����Ă��v���I���ɑ��������킯�� �@�@�@�@�͂Ȃ��APICkit2��蒷���g���邩���E�E�E�Ƃ̒��x�̂��ƁB �@�@�@��������PIC�̒�����K��PIC��I�肵����J���������������肷��ɓ������ẮA������ �@�@�@�@Web�̒�����A����air variable����̋L���i�Q�l�����P�j����іؑ��ɗT����̋L���i�Q�l �@�@�@�@�����Q�j���Q�l�ɂ����B���ӂ��܂��B �@�@�@�ƍl����PICkit2���܂����B �@�@�������APICkit2���g�����ꂽ����i�NjL�j �@�@�@�@�V�����@��̐���Ɏ��g�����Ƃ���PIC16�n�ł͎����ł��Ȃ����Ƃ�������i12���FEEPROM �@�@�@�T�|�[�g���jPIC18�n��PIC18F25K22�ɍi�����B�Ƃ��낪�������̂͂���PIC��PICkit2�Ńv�� �@�@�@�O�������������߂Ȃ��i�T�|�[�g���Ă��Ȃ��j���Ƃ�������A��������I �@�@�@�������Ȃ�PICKit3���w��������Ȃ��Ȃ��Ă��܂����B�����~�̑��I �@�@�@���P�F�����g���u���̎��܂������x�̐V�����c�[�������B �S�D�k�b�c�̋P�x�����̂u�q�͒�߂ɁI�@�}�j���A���̊ԈႢ������I�@'14/07/14 �@�@�@�J�����Ƃo�h�b���̂���肵�Ă���A�ŏ��̖ڕW�͂k�b�c�ɕ������f���o�����ƁB �@�@�Ȃ��Ȃ�A�`�a�r�i�����ŏ��Ɏ��g�J���Ώۂ̖��́j�̈�ԏd�v�ȋ@�\��RS-232C���� �@�@��������M���邱�Ƃł���A���̂��߂̃f�o�b�O��i�Ƃ��Ď�M�����������k�b�c�ɕ\������ �@�@���Ƃ������B �@�@�@�k�b�c�h���C�o�[�\�t�g�������őg�ނ��Ƃ��\�Ƃ̂��ƂŁA�����air variable����i�Q �@�@�l�����P�j����Ԃ̎Q�l�ɂ��đg�ݍ��݁A�l�b�t�̏������x�ɍ��킹���K�ȃ^�C�~���O�ƓK �@�@�ȕ��̃`���[�j���O�������ł�����B �@�����s�k�� �@�@���߂ĕ������k�b�c�ɕ\��������̂Ɏ肱�������B �@�@�ӓ_�͂k�b�c�̋P�x�����p�̓d������������{�����[�����ŏ��ɒ������Ȃ��������ƁB�d���� �@�@��������ʂ��^�����ŁA�������o�Ă���̂ɋC�Â����A�^�C�~���O�ƕ��̒�������s���� �@�@���Đ����ʂɂ��� (^_^;) �@�@���P�F�P�x�����p�̓d���͒�߂ɂ��ăe�X�g���n�߂邱�ƁB �@���]�\�� �@�@���̋M�d�Ȍo����ςނ��Ƃ��ł����ق��ɁA������̐��ʂ�SC1602BSL�̃}�j���A���ɁA�� �@�@���ݒ�̈�A�̖��߃V�[�P���X�̒��Ţ100���҂ģ�Ƃ̋L�q�����邪��������B�����̌��� �@�@�100�ʂ���҂Ă悢���Ƃ��m�F�ł����B �@�@���̌と100�ʂ��ł͐���ɏ��������I���Ȃ����Ƃ����邱�Ƃ������肻�̌��1ms�ɂ��Ă� �@�@��B �@�@�@�@ �T�D�X�g�b�v�r�b�g���@one or two stop bits�@'14/07/14 �@�@�Etwo stop bits��PIC16F�n�ł͂ł��Ȃ��BAUSART���g�킸�S�ăv���O���~���O���đ��M����� �@�@�@�����ł��邩������Ȃ�������Ă��Ȃ��B �@�@�@two stop bits��PIC24�n���g����UART�Ŏ����ł���悤�ł���B�i�Q�l�����T page149�j �U�DPIC�֍ď������݂ł��Ȃ��g���u���@'14/07/14 �@�@PIC��PICkit2�Ńv���O�������������߂��APIC����ꂽ�I�@�Ƒ����_�����o���k�B �@�@�E�w�������H���́@PIC16F88 CPU�{�[�h���W���[���L�b�g�ɂ�20MHz�̊O�t�����U�q���t������ �@�@�@���čŏ��̐����͂��̊O�t�����U�q�Ŏ������Ă����B �@�@�E����PIC�͊O�����U�q���g��Ȃ��������U�������\�ŁA����������Ă݂��Ƃ��̃g���u���B �@�@�@�v���O������������U�����ɕύX������f�o�b�O���I���APIC�ɏ������琳��ɏ������� �@�@�@���B���������B �@�@�E�v���O�������ꕔ�ύX���ď����������Ƃ����珑�����߂Ȃ��I�@�f�o�C�X���̂�F���ł��� �@�@�@���Ƃ̃G���[���b�Z�[�W�I�@�������Ă��������߂Ȃ��B�ď������݂��ł��Ȃ��̂��B �@�@�@�v���O�������O�����U�q������d�l�ɖ߂��Ă��������߂Ȃ��B �@�@�EPIC����ꂽ�Ǝv���āA��ނȂ�����PIC��lj��w���B�O�̂��߂S�B �@�@�E�V����PIC16F88�ł���Ă݂�ƁA����͏������߂邪�Q��ڈȍ~�͏������߂Ȃ��I�@ �@�@�E���l�̃g���u����Web���ׂĂ݂�ƁA�Q�l�����U�����������B�v��� �@�@�@�@�@�v���O�������������ޑO��PIC�ɒʏ�d������������Ă��܂��A�������ݍς� �@�@�@�@�@�v���O�������������U�œ����Ă��܂��āA�V�����������݂��ł��Ȃ� �@�@�@�Ƃ̂��ƁB����Ɠ����Ǐ�Ɏv����B �@�@�E����܂ł̏������ݕ��@�́AMPLAB�Ń\�[�X�v���O�������C����ɁA�R���p�C����PIC�ւ̏� �@�@�@�����݂��s�����߂� Make and Program Device�A�C�R��
 ���N���b�N�������B
�@�@�E�����ŁAMPLAB�ł�Build�A�C�R��
���N���b�N�������B
�@�@�E�����ŁAMPLAB�ł�Build�A�C�R�� �ŃR���p�C���܂ōs���APIC�ւ̏������݂�PICkit2
�@�@�@�P�Ƃōs���i���̂�Hex�t�@�C����Import��PIC�ւ�Write���w������j�悤�ɂ����琳���
�@�@�@�������߂邱�Ƃ����������B�@�ȗ����̕��@�ŏ�������ł���B
�@�@�E�I���ʂƂ��āA���������PC�ւ�USB�[�q�����̂ǔ����K�v���Ȃ��Ȃ����B
�@�@�@�i�������݂��I���Ɠd��������������~�����BMake and Program Device�𗘗p����ꍇ
�@�@�@�@�ɂ���������ɓd��������������~����I�v�V����������̂�������Ȃ������ɂ͕���
�@�@�@�@��Ȃ��j
�@�@�@���̓d�������̂��ƂŁA���̌��PICkit3���ĕ����������ƁB
�@�@�@�@�@MPLAB X IDE�ł̃R���p�C����PIC�ւ̃v���O���~���O�i�������݁j����̉����Ă���̂�
�@�@�@�@�@USB�[�q���Ȃ���PIC�ւ̓d����������Ȃ��悤���B����ŁAPIC���O��
�@�@�@�@�@USB�[�q���Ă���B�킸��킵���B
�@�@�@�@�@�Â��h���C�o�[���g����PICkit3�P�ƂŃv���O���~���O�ł���悤���������Ă��Ȃ��B
�@�@�@�@�@���̂����A��������USB�[�q���}������̂��߂�ǂ��ŁA�}��
�@�@�@�@�@���܂܂�PIC���O������t�����肵�Ă��邪���͋N�����Ă��Ȃ��B���̂Ƃ���E�E�E
�@�@�@�@�@
�V�DPICkit3��PIC��F�����Ȃ��g���u���iMPLAB X IDE v2.10 PICkit3�j�@'14/12/15
�@�@PICkit3���n�߂Ďg���Ƃ��Ɍo�����鋰�|�I�@����͎��̃G���[���ԕ����ŏo�邱�ƁB
�@�@�@Target device was not found. You must connect to a target device to use PICkit 3.
�@�@������PICkit3�ł�PICkit����d�C��^���Ȃ����Ƃ�����l�ɂȂ������߁B
�@�@�������
�@�@�@�EProject��Properties(�v���W�F�N�g����I�����E�N���b�N�A��ԉ�)
�@�@�@�@�@���@PICkit3��I��
�@�@�@�@�@���@Option categories:�̃v���_�E�����j���[��Power��I��
�@�@�@�@�@���@Power target from PICkit3�Ƀ`�F�b�N
�@�@�@�@�@�@�@�iVoltage Level�͂����Ȃ��Ă悭�A5.0�̂܂܁j
�@�@�@�@�@���@OK
�@�@�@�E�v���O�����������݂��w��
�@�@�@�@�@���@���̓d����{���ɗ^���邩��₢���킹�Ă����ꍇ��
�@�@�@�@�@���@OK
�@�@
�W�DPIC18F25K22��64MHz�@
�ŃR���p�C���܂ōs���APIC�ւ̏������݂�PICkit2
�@�@�@�P�Ƃōs���i���̂�Hex�t�@�C����Import��PIC�ւ�Write���w������j�悤�ɂ����琳���
�@�@�@�������߂邱�Ƃ����������B�@�ȗ����̕��@�ŏ�������ł���B
�@�@�E�I���ʂƂ��āA���������PC�ւ�USB�[�q�����̂ǔ����K�v���Ȃ��Ȃ����B
�@�@�@�i�������݂��I���Ɠd��������������~�����BMake and Program Device�𗘗p����ꍇ
�@�@�@�@�ɂ���������ɓd��������������~����I�v�V����������̂�������Ȃ������ɂ͕���
�@�@�@�@��Ȃ��j
�@�@�@���̓d�������̂��ƂŁA���̌��PICkit3���ĕ����������ƁB
�@�@�@�@�@MPLAB X IDE�ł̃R���p�C����PIC�ւ̃v���O���~���O�i�������݁j����̉����Ă���̂�
�@�@�@�@�@USB�[�q���Ȃ���PIC�ւ̓d����������Ȃ��悤���B����ŁAPIC���O��
�@�@�@�@�@USB�[�q���Ă���B�킸��킵���B
�@�@�@�@�@�Â��h���C�o�[���g����PICkit3�P�ƂŃv���O���~���O�ł���悤���������Ă��Ȃ��B
�@�@�@�@�@���̂����A��������USB�[�q���}������̂��߂�ǂ��ŁA�}��
�@�@�@�@�@���܂܂�PIC���O������t�����肵�Ă��邪���͋N�����Ă��Ȃ��B���̂Ƃ���E�E�E
�@�@�@�@�@
�V�DPICkit3��PIC��F�����Ȃ��g���u���iMPLAB X IDE v2.10 PICkit3�j�@'14/12/15
�@�@PICkit3���n�߂Ďg���Ƃ��Ɍo�����鋰�|�I�@����͎��̃G���[���ԕ����ŏo�邱�ƁB
�@�@�@Target device was not found. You must connect to a target device to use PICkit 3.
�@�@������PICkit3�ł�PICkit����d�C��^���Ȃ����Ƃ�����l�ɂȂ������߁B
�@�@�������
�@�@�@�EProject��Properties(�v���W�F�N�g����I�����E�N���b�N�A��ԉ�)
�@�@�@�@�@���@PICkit3��I��
�@�@�@�@�@���@Option categories:�̃v���_�E�����j���[��Power��I��
�@�@�@�@�@���@Power target from PICkit3�Ƀ`�F�b�N
�@�@�@�@�@�@�@�iVoltage Level�͂����Ȃ��Ă悭�A5.0�̂܂܁j
�@�@�@�@�@���@OK
�@�@�@�E�v���O�����������݂��w��
�@�@�@�@�@���@���̓d����{���ɗ^���邩��₢���킹�Ă����ꍇ��
�@�@�@�@�@���@OK
�@�@
�W�DPIC18F25K22��64MHz�@ �@�@PIC16F193X�̏ꍇ��295�y�[�W�ɓ��l�̋L�ڂ�����B
�@PIC16F88�n��PIC18F2550�n�̏ꍇ�́@�G���[�̎�ނɂ�炸CREN���I�t�ɂ��A�I���ɂ����
�@�悢�B��₱�����`
�@�@�f�[�^�u�b�N�����܂��܌��Ă��ċC�Â����B�߂����ɋN����Ȃ��G���[�Ȃ̂ŕ��ʂ̃e�X
�@�g�ł͔����ł��Ȃ����낤�I�@�v���ӂł���B�d�l�����킹�Ă����Ă���`
15�D�o�C�i���[�G�f�B�^�Stirling��@��PIC�Ƃ͒��ڊW�͂Ȃ������Y�^�Ƃ��ċL�ځ��@'15/04/09
�@�@PIC�ōs���ʐM�v���O����(ABS)�̃f�o�b�O�̂��߂ɢTera Term����瑗�荞�ރe�X�g�f�[�^��
�@����0x00��0x03������K�v�ɔ���ꂽ�BWeb��T������Ă��ǂ蒅�����̂�
�@�Stirling�i�㓡 �a�d������̃t���[�\�t�g�j��ł���B16�i���\�L�ł̕ҏW���ȒP�ɂł��A
�@�ƂĂ��悭�o���Ă���B
�@�f�o�b�O�菇�́A
�@�@Stirling��0x00�Ȃǂ��܂ރf�[�^�t�@�C�����쐬
�@�@�@��
�@�@Tera Term�̃t�@�C�����M�@�\�ő��M
�@�@�@�i���M�O�Ɂ@���o�C�i���@�Ƀ`�F�b�N���邱�Ƃ�Y��Ȃ��悤�ɁI�j
16�DIDE��xc8�R���p�C���[���o�[�W�����A�b�v������EEPROM�ɃA�N�Z�X�ł��Ȃ��@'16/02/03
�@�@���ہFIDE��xc8�R���p�C���[���o�[�W�����A�b�v�����B�������Â��o�[�W�����̂�����
�@�@�@�@�@�A���C���X�g�[��������V�����o�[�W�������C���X�g�[���B
�@�@�@�@�@�@�@MPLAB X IDE �@�@�@�@v3.05�@���@v3.20
�@�@�@�@�@�@�@MPLAB XC8�R���p�C�� v1.34�@���@v1.36
�@�@�@�@�@�@�@�]�k�Fmicrochip�Ђ̓��{�����HP�̂����̃_�E�����[�h���j���[��ʏ�ŕ\��
�@�@�@�@�@�@�@�@�@�@����Ă���o�[�W�����ԍ��Ǝ��ۂɃ_�E�����[�h�����o�[�W�����ԍ�����
�@�@�@�@�@�@�@�@�@�@�Ȃ��Ă���I�I�I�@�����g�H�I�I�I�@���Ȃ�Ȃ��I�I�I
�@�@�@�@�@��������V�����o�[�W������EEPROM�̓ǂݏ������ł��Ȃ��Ȃ����B
�@�@�@�@�@�@�@��eeprom_read()��eeprom_write() �������삵�Ȃ���
�@�@�@�@�@�o�[�W�����A�b�v��Ǝ��A�R���p�C�����A�v���O�����������ݎ�����ю��s���ɉ��̃�
�@�@�@�@�@�[�j���O���b�Z�[�W���o�Ă��Ȃ��B
�@�@�����F���̃o�[�W�������ăC���X�g�[��������A���낢�뎎�s���낵�������炸�A�v�ē�����B
�@�@�@�@�@���܂��ܕʂ�PC�Ɍ��̃o�[�W������IDE��XC8�R���p�C���ł̊J�������c���Ă���A
�@�@�@�@�@EEPROM�ɃA�N�Z�X�ł���ꍇ�ƃA�N�Z�X�ł��Ȃ��ꍇ�̃v���O�����T�C�Y���ׂ邱��
�@�@�@�@�@���ł����B
�@�@�@�@�@��r�̌��ʁA�{���͑S�������͂��Ȃ̂ɁA�A�N�Z�X�ł��Ȃ��ꍇ�̕����T�C�Y���������B
�@�@�@�@�@�����EEPROM�A�N�Z�X�ւ���R�[�h������Ă��Ȃ����Ƃ��Ӗ�����B
�@�@�@�@�@���̖����ȏ؋��ɂ��R���p�C���[�̓�����^���͂��߁A�R���p�C���[�ւ̓���w��E
�@�@�@�@�@�C���h�E���̊e���ڂ��r���������o�b�͑S�������w��B
�@�@��F���̑�����{������v���O�����T�C�Y���������Ȃ�AEEPROM�ɃA�N�Z�X�ł���悤�ɂ�
�@�@�@�@�@�����B
�@�@�@�@�@�@�EIDE��xc8�R���p�C���[���C���X�g�[��������MPLABX�t�H���_�[��xc8�t�H���_�[��
�@�@�@�@�@�@�@�z���̌Ão�[�W�����̃t�H���_�[�͎c�������ꂢ�ɍ폜����B
�@�@�@�@�@�@�@�iProgram Files �t�H���_�[�z����Microchip�t�H���_�[�̒��B�A���C���X�g�[����
�@�@�@�@�@�@�@�@�ɖڂŊm�F���č폜���邱�Ɓj
�@�@�@�@�@�@�EIDE�̃v���W�F�N�g��`�̌Â����̂��폜�B
�@�@�@�@�@�@�@�iIDE�Ńv���W�F�N�g���폜���Ă��烆�[�U�[�t�H���_�[�z����MPLABXProjects�̒�
�@�@�@�@�@�@�@�@�̎c�[���폜���邱�Ɓj
�@�@�@�@�@�@�E�V�����v���W�F�N�g��o�^����B
�@�@�@�@�����O���ڑS�Ă��s��Ȃ��ƃ_���Ȃ̂��͕s���B���̂����ǂꂩ������{������������
�@�@�@�@�Ȃ����A����ȏ�̋����͕͗s���ł�������s���B
�@�@�@�@�z�������A�R���p�C���[���w�b�_�[�t�@�C������J��i������j�Ƃ��ɘA������Ă����[
�@�@�@�@�j���O���o�����ɂق����炩���ɂ��Ă��܂��Ă���̂ł͂Ȃ����ȁHMicrochip����撣��
�@�@�@�@�āI
17�DIDE��xc8�R���p�C���[���o�[�W�����A�b�v������EEPROM�Ɋւ��ăR���p�C���G���[�ɂȂ�@'17/05/23
�@�@���ہF
�@�@�@�@�@IDE��xc8�R���p�C���[��V����������PC�փC���X�g�[�������B
�@�@�@�@�@�@�@MPLAB X IDE �@�@�@�@�@v3.40�@�i��PC�̂Ƃ���v3.20�j
�@�@�@�@�@�@�@MPLAB XC8�R���p�C�� �@v1.40�@�i��PC�̂Ƃ���v1.36�j
�@�@�@�@�@��������Aeeprom_read()��eeprom_write() ���ŃR���p�C���G���[�B
�@�@�@�@�@�@warning: (1404) unsupported: The Busy_eep routine is no longer supported. Please use the MPLAB X MCC.
�@�@�@�@�@�@warning: (1404) unsupported: The Read_b_eep routine is no longer supported. Please use the MPLAB X MCC.
�@�@�@�@�@���b�Z�[�W�̎�|��
�@�@�@�@�@�@�����̊��͏����g���Ȃ��Ȃ�̂ŁAMCC ���g���Ȃ����I
�@�@�@�@�@�Ƃ̂��ƁB�@����ā`�I�@MCC���ĉ����I�@HEX�t�@�C��������Ȃ��I
�@�@�@�@�@��PC�ł͓����\�[�X�v���O�����Ŗ�肪�Ȃ������̂ɁB
�@�@�����Ƒ�F
�@�@�@�@�@Web�Œ��ׂ�ƁA�Q�l���� 13 �c�[���E���{ ����
�@�@�@�@�@�@�EMCC�iMPLAB Code Configurator�j���g���Ď����Ŋ���������@
�@�@�@�@�@�@�E��֍�Ƃ��ď]������̊���Microchip�Ђ���_�E�����[�h���Ă�����@
�@�@�@�@�@�ɂ��ď�����Ă����܂��B
�@�@�@�@�@�ڂ��������Ă����܂������ɂ͊��������ɍ�鎩�M���Ȃ��A�����ɏ�����Ă����
�@�@�@�@�@�֍�i�]������̊���Microchip�Ђ���_�E�����[�h���Ă�����@�j���̗p���܂����B
�@�@�@�@�@���̗v�_�B
�@�@�@�@�@�@�P�@microchip�Ђ�XC8�R���p�C���[�̃y�[�W�i�Q�l���� 14�j����A
�@�@�@�@�@�@�@�@�@�g�p����PIC�^�ԂɊY������@Legacy Peripheral Libraries�@���_�E�����[�h
�@�@�@�@�@�@�@�@���C���X�g�[���B�@���ʂނ����������Ƃ͂Ȃ��B
�@�@�@�@�@�@�@�@�@������̓R���p�C���[�ɑ���I�v�V�����Ȃ̂ň�����{����悢��
�@�@�@�@�@�@�Q�@Peripheral Libraries���g�p���邱�Ƃ�ݒ肷��B
�@�@�@�@�@�@�@�@�@������̓v���W�F�N�g���쐬���邲�ƂɎ��{���遄
�@�@�@�@�@�@�@�@�@�Y���v���W�F�N�g�@���@�E�N���b�N�@���@Properties�@�� XC8 linker
�@�@�@�@�@�@�@�@�@�@���@�v���_�E�����j���[Runtime
�@�@�@�@�@�@�@�@�@�@�@�@�@���ɉB��Ă���@Link in Peripheral Library �Ƀ`�F�b�N
�@�@�@�@�@�@�@�@
�@�@PIC16F193X�̏ꍇ��295�y�[�W�ɓ��l�̋L�ڂ�����B
�@PIC16F88�n��PIC18F2550�n�̏ꍇ�́@�G���[�̎�ނɂ�炸CREN���I�t�ɂ��A�I���ɂ����
�@�悢�B��₱�����`
�@�@�f�[�^�u�b�N�����܂��܌��Ă��ċC�Â����B�߂����ɋN����Ȃ��G���[�Ȃ̂ŕ��ʂ̃e�X
�@�g�ł͔����ł��Ȃ����낤�I�@�v���ӂł���B�d�l�����킹�Ă����Ă���`
15�D�o�C�i���[�G�f�B�^�Stirling��@��PIC�Ƃ͒��ڊW�͂Ȃ������Y�^�Ƃ��ċL�ځ��@'15/04/09
�@�@PIC�ōs���ʐM�v���O����(ABS)�̃f�o�b�O�̂��߂ɢTera Term����瑗�荞�ރe�X�g�f�[�^��
�@����0x00��0x03������K�v�ɔ���ꂽ�BWeb��T������Ă��ǂ蒅�����̂�
�@�Stirling�i�㓡 �a�d������̃t���[�\�t�g�j��ł���B16�i���\�L�ł̕ҏW���ȒP�ɂł��A
�@�ƂĂ��悭�o���Ă���B
�@�f�o�b�O�菇�́A
�@�@Stirling��0x00�Ȃǂ��܂ރf�[�^�t�@�C�����쐬
�@�@�@��
�@�@Tera Term�̃t�@�C�����M�@�\�ő��M
�@�@�@�i���M�O�Ɂ@���o�C�i���@�Ƀ`�F�b�N���邱�Ƃ�Y��Ȃ��悤�ɁI�j
16�DIDE��xc8�R���p�C���[���o�[�W�����A�b�v������EEPROM�ɃA�N�Z�X�ł��Ȃ��@'16/02/03
�@�@���ہFIDE��xc8�R���p�C���[���o�[�W�����A�b�v�����B�������Â��o�[�W�����̂�����
�@�@�@�@�@�A���C���X�g�[��������V�����o�[�W�������C���X�g�[���B
�@�@�@�@�@�@�@MPLAB X IDE �@�@�@�@v3.05�@���@v3.20
�@�@�@�@�@�@�@MPLAB XC8�R���p�C�� v1.34�@���@v1.36
�@�@�@�@�@�@�@�]�k�Fmicrochip�Ђ̓��{�����HP�̂����̃_�E�����[�h���j���[��ʏ�ŕ\��
�@�@�@�@�@�@�@�@�@�@����Ă���o�[�W�����ԍ��Ǝ��ۂɃ_�E�����[�h�����o�[�W�����ԍ�����
�@�@�@�@�@�@�@�@�@�@�Ȃ��Ă���I�I�I�@�����g�H�I�I�I�@���Ȃ�Ȃ��I�I�I
�@�@�@�@�@��������V�����o�[�W������EEPROM�̓ǂݏ������ł��Ȃ��Ȃ����B
�@�@�@�@�@�@�@��eeprom_read()��eeprom_write() �������삵�Ȃ���
�@�@�@�@�@�o�[�W�����A�b�v��Ǝ��A�R���p�C�����A�v���O�����������ݎ�����ю��s���ɉ��̃�
�@�@�@�@�@�[�j���O���b�Z�[�W���o�Ă��Ȃ��B
�@�@�����F���̃o�[�W�������ăC���X�g�[��������A���낢�뎎�s���낵�������炸�A�v�ē�����B
�@�@�@�@�@���܂��ܕʂ�PC�Ɍ��̃o�[�W������IDE��XC8�R���p�C���ł̊J�������c���Ă���A
�@�@�@�@�@EEPROM�ɃA�N�Z�X�ł���ꍇ�ƃA�N�Z�X�ł��Ȃ��ꍇ�̃v���O�����T�C�Y���ׂ邱��
�@�@�@�@�@���ł����B
�@�@�@�@�@��r�̌��ʁA�{���͑S�������͂��Ȃ̂ɁA�A�N�Z�X�ł��Ȃ��ꍇ�̕����T�C�Y���������B
�@�@�@�@�@�����EEPROM�A�N�Z�X�ւ���R�[�h������Ă��Ȃ����Ƃ��Ӗ�����B
�@�@�@�@�@���̖����ȏ؋��ɂ��R���p�C���[�̓�����^���͂��߁A�R���p�C���[�ւ̓���w��E
�@�@�@�@�@�C���h�E���̊e���ڂ��r���������o�b�͑S�������w��B
�@�@��F���̑�����{������v���O�����T�C�Y���������Ȃ�AEEPROM�ɃA�N�Z�X�ł���悤�ɂ�
�@�@�@�@�@�����B
�@�@�@�@�@�@�EIDE��xc8�R���p�C���[���C���X�g�[��������MPLABX�t�H���_�[��xc8�t�H���_�[��
�@�@�@�@�@�@�@�z���̌Ão�[�W�����̃t�H���_�[�͎c�������ꂢ�ɍ폜����B
�@�@�@�@�@�@�@�iProgram Files �t�H���_�[�z����Microchip�t�H���_�[�̒��B�A���C���X�g�[����
�@�@�@�@�@�@�@�@�ɖڂŊm�F���č폜���邱�Ɓj
�@�@�@�@�@�@�EIDE�̃v���W�F�N�g��`�̌Â����̂��폜�B
�@�@�@�@�@�@�@�iIDE�Ńv���W�F�N�g���폜���Ă��烆�[�U�[�t�H���_�[�z����MPLABXProjects�̒�
�@�@�@�@�@�@�@�@�̎c�[���폜���邱�Ɓj
�@�@�@�@�@�@�E�V�����v���W�F�N�g��o�^����B
�@�@�@�@�����O���ڑS�Ă��s��Ȃ��ƃ_���Ȃ̂��͕s���B���̂����ǂꂩ������{������������
�@�@�@�@�Ȃ����A����ȏ�̋����͕͗s���ł�������s���B
�@�@�@�@�z�������A�R���p�C���[���w�b�_�[�t�@�C������J��i������j�Ƃ��ɘA������Ă����[
�@�@�@�@�j���O���o�����ɂق����炩���ɂ��Ă��܂��Ă���̂ł͂Ȃ����ȁHMicrochip����撣��
�@�@�@�@�āI
17�DIDE��xc8�R���p�C���[���o�[�W�����A�b�v������EEPROM�Ɋւ��ăR���p�C���G���[�ɂȂ�@'17/05/23
�@�@���ہF
�@�@�@�@�@IDE��xc8�R���p�C���[��V����������PC�փC���X�g�[�������B
�@�@�@�@�@�@�@MPLAB X IDE �@�@�@�@�@v3.40�@�i��PC�̂Ƃ���v3.20�j
�@�@�@�@�@�@�@MPLAB XC8�R���p�C�� �@v1.40�@�i��PC�̂Ƃ���v1.36�j
�@�@�@�@�@��������Aeeprom_read()��eeprom_write() ���ŃR���p�C���G���[�B
�@�@�@�@�@�@warning: (1404) unsupported: The Busy_eep routine is no longer supported. Please use the MPLAB X MCC.
�@�@�@�@�@�@warning: (1404) unsupported: The Read_b_eep routine is no longer supported. Please use the MPLAB X MCC.
�@�@�@�@�@���b�Z�[�W�̎�|��
�@�@�@�@�@�@�����̊��͏����g���Ȃ��Ȃ�̂ŁAMCC ���g���Ȃ����I
�@�@�@�@�@�Ƃ̂��ƁB�@����ā`�I�@MCC���ĉ����I�@HEX�t�@�C��������Ȃ��I
�@�@�@�@�@��PC�ł͓����\�[�X�v���O�����Ŗ�肪�Ȃ������̂ɁB
�@�@�����Ƒ�F
�@�@�@�@�@Web�Œ��ׂ�ƁA�Q�l���� 13 �c�[���E���{ ����
�@�@�@�@�@�@�EMCC�iMPLAB Code Configurator�j���g���Ď����Ŋ���������@
�@�@�@�@�@�@�E��֍�Ƃ��ď]������̊���Microchip�Ђ���_�E�����[�h���Ă�����@
�@�@�@�@�@�ɂ��ď�����Ă����܂��B
�@�@�@�@�@�ڂ��������Ă����܂������ɂ͊��������ɍ�鎩�M���Ȃ��A�����ɏ�����Ă����
�@�@�@�@�@�֍�i�]������̊���Microchip�Ђ���_�E�����[�h���Ă�����@�j���̗p���܂����B
�@�@�@�@�@���̗v�_�B
�@�@�@�@�@�@�P�@microchip�Ђ�XC8�R���p�C���[�̃y�[�W�i�Q�l���� 14�j����A
�@�@�@�@�@�@�@�@�@�g�p����PIC�^�ԂɊY������@Legacy Peripheral Libraries�@���_�E�����[�h
�@�@�@�@�@�@�@�@���C���X�g�[���B�@���ʂނ����������Ƃ͂Ȃ��B
�@�@�@�@�@�@�@�@�@������̓R���p�C���[�ɑ���I�v�V�����Ȃ̂ň�����{����悢��
�@�@�@�@�@�@�Q�@Peripheral Libraries���g�p���邱�Ƃ�ݒ肷��B
�@�@�@�@�@�@�@�@�@������̓v���W�F�N�g���쐬���邲�ƂɎ��{���遄
�@�@�@�@�@�@�@�@�@�Y���v���W�F�N�g�@���@�E�N���b�N�@���@Properties�@�� XC8 linker
�@�@�@�@�@�@�@�@�@�@���@�v���_�E�����j���[Runtime
�@�@�@�@�@�@�@�@�@�@�@�@�@���ɉB��Ă���@Link in Peripheral Library �Ƀ`�F�b�N
�@�@�@�@�@�@�@�@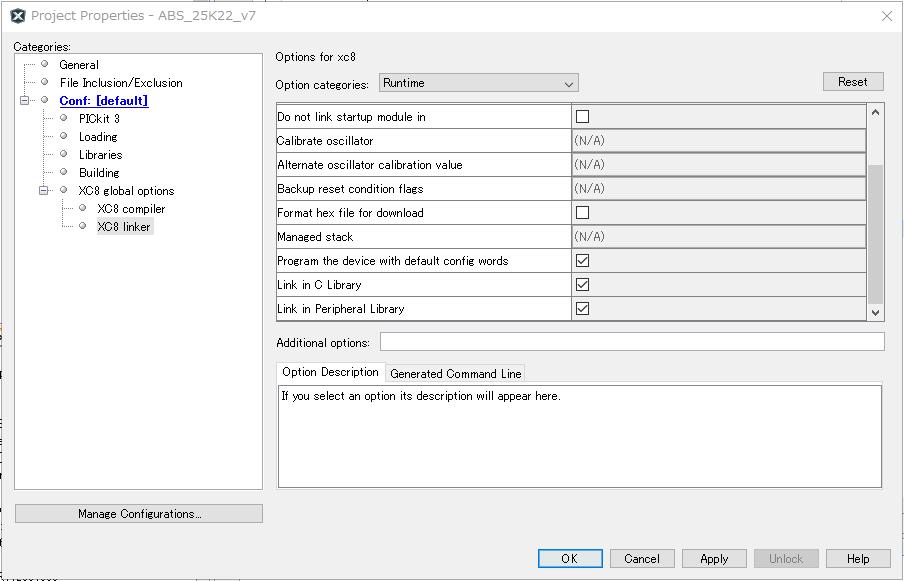 �@�@�@�@�@�@�@�@�����A���̐ݒ��Y���ƃR���p�C���̌��ʁA���̃G���[�ɂȂ�B
�@�@�@�@�@�@�@�@�@:0: error: (500) undefined symbols:
�@�@�@�@�@�@�@_Write_b_eep(dist/default/production\ABS_25K22_v7.X.production.obj) _Busy_eep(dist/default/production\�@�ȉ��ȗ�
�@�@�@�@�@�@�@�@
�@�@�@�@�@�@�@�@�����A���̐ݒ��Y���ƃR���p�C���̌��ʁA���̃G���[�ɂȂ�B
�@�@�@�@�@�@�@�@�@:0: error: (500) undefined symbols:
�@�@�@�@�@�@�@_Write_b_eep(dist/default/production\ABS_25K22_v7.X.production.obj) _Busy_eep(dist/default/production\�@�ȉ��ȗ�
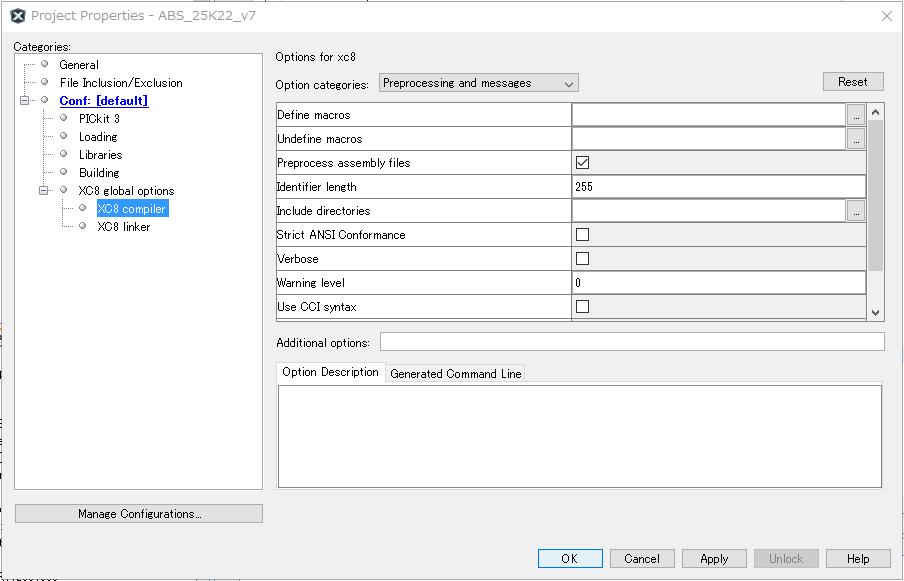
�@�@�@�@�@�@�@�@ 18.�@���łɏ����Ă����ƁAXC8 compiler �� Warning level �̊���l���ς�����悤�Ɏv���B��
�@�@�[�j���O�ł�HEX�t�@�C��������Ă���Ȃ��̂ŕύX���Ă������ƁB���� 0 �ɐݒ�B
�@�@�@�@�@�@�@�@
18.�@���łɏ����Ă����ƁAXC8 compiler �� Warning level �̊���l���ς�����悤�Ɏv���B��
�@�@�[�j���O�ł�HEX�t�@�C��������Ă���Ȃ��̂ŕύX���Ă������ƁB���� 0 �ɐݒ�B
�@�@�@�@�@�@�@�@ 19. PICkit3�̏ꍇ VDD�d��������VDD�d���w��ɗ���
�@�@�@PICkit3���g���Ă̏������ݎ���VDD�ւ̓d���������w�肷��K�v������B
�@�@�@�@�K��l���u�������Ȃ��v�ɂȂ��Ă���̂ŁA�������ݎ���
�@�@�@�@�@�@Target device was not found (could not detect target voltage VDD). You must connect to a target device to use PICkit 3.
�@�@�@�@�̃G���[�ɂȂ�B
�@�@�@���
�@�@�@�@Project���@�E�N���b�N�@���@Propaerties
�@�@�@�@�@���@Categories����PICkit3��I���@���@Option categories����Power��I��
�@�@�@�@�@���@Power Target circuit from PICkit3���`�F�b�N
�@�@�@�@���̉�ʂ�VDD�d�����w��ł���i�K��l5V�j
20�D�R�����g�E�[���@�����u�\�v�u�\�v�@���ƃR���p�C���G���[�ɂȂ�@'17/05/23
�@�@�@C����̔z��ɑ��ăR�����g�ŁA�e�ؐS�ŁA�`�\�@���ċL�q������R���p�C���ŃG���[�I
�@�@�@���X���\�@�����߁I
�@�@�����u�\�v�u�\�v�́wShift-JIS�̃_�������x�ȂB���ɂ����낢�날���B�Q�l���� 15�B
�@�@�@(�`�\�@�́@�`�e�[�u���@�Ə����ׂ��B�`���\�@�́@���ł���@�Ə����ׂ��B)
�@�@�@������PIC��Microchip�ЂɊW�Ȃ����� (^_^;)
21�DMPLAB X IPE ���g����HEX�t�@�C�����������ށiMPLAB IPE �g�����j�@'17/05/26
�@�@���{���̎��т́AMPLAB IPE v3.40�@MPLAB X IDE v3.40�@PICkit3 �@Windows10�ł���
�@�@�@�R���p�C�����Ă���PIC�ɏ������ނȂ� MPLAB X IDE �ōs���悢�B�������A�o���オ��
�@�@�Ă���A�܂��͓��肵��HEX�t�@�C���̏������݂͂ǂ�ȕ��@�ōs�����H
�@�@�c�O�Ȃ��� MPLAB X IDE �ł͂ł��܂���B
�@�@�@���� MPLAB IPE (Integrated Programmer Environment)���g�����Ƃɂ��܂����B���̕��@��
�@�@�Ȍ��ɐ������܂��B
�@�@�@�EMPLAB X IDE ���C���X�g�[���������� MPLAB IPE ���C���X�g�[�����Ă��Ȃ���A
�@�@�@�@������C���X�g�[������B
�@�@�@�EMPLAB IPE ���N��
�@�@�@�@�@������IPE�̉�ʂ̏c���������Ď��̓����t�����1366x768�ł��肬��B
�@�@�@�@�@�O�t���t�����1280x1024���Ɨ]�T���聄
�@�@�@�E�f�o�C�X�iPIC�j��PICkit3�o�R�ł̓d��������ݒ�
�@�@�@�@�@���j���[�o�[�@Setting�@���@Advanced Mode�@���@�p�X���[�h�� microchip
�@�@�@�@�@���@���Ƀ��j���[�������
�@�@�@�@�@���@Power
�@�@�@�@�@���@���̉�ʗ�̂悤�Ɂ@�d����I���i�����PIC18F25K22�̏ꍇ��5.0V�j���A
�@�@�@�@�@�@�@ Power Target Circuit from Tool�@�Ƀ`�F�b�N
�@�@�@�@�@�@�@
19. PICkit3�̏ꍇ VDD�d��������VDD�d���w��ɗ���
�@�@�@PICkit3���g���Ă̏������ݎ���VDD�ւ̓d���������w�肷��K�v������B
�@�@�@�@�K��l���u�������Ȃ��v�ɂȂ��Ă���̂ŁA�������ݎ���
�@�@�@�@�@�@Target device was not found (could not detect target voltage VDD). You must connect to a target device to use PICkit 3.
�@�@�@�@�̃G���[�ɂȂ�B
�@�@�@���
�@�@�@�@Project���@�E�N���b�N�@���@Propaerties
�@�@�@�@�@���@Categories����PICkit3��I���@���@Option categories����Power��I��
�@�@�@�@�@���@Power Target circuit from PICkit3���`�F�b�N
�@�@�@�@���̉�ʂ�VDD�d�����w��ł���i�K��l5V�j
20�D�R�����g�E�[���@�����u�\�v�u�\�v�@���ƃR���p�C���G���[�ɂȂ�@'17/05/23
�@�@�@C����̔z��ɑ��ăR�����g�ŁA�e�ؐS�ŁA�`�\�@���ċL�q������R���p�C���ŃG���[�I
�@�@�@���X���\�@�����߁I
�@�@�����u�\�v�u�\�v�́wShift-JIS�̃_�������x�ȂB���ɂ����낢�날���B�Q�l���� 15�B
�@�@�@(�`�\�@�́@�`�e�[�u���@�Ə����ׂ��B�`���\�@�́@���ł���@�Ə����ׂ��B)
�@�@�@������PIC��Microchip�ЂɊW�Ȃ����� (^_^;)
21�DMPLAB X IPE ���g����HEX�t�@�C�����������ށiMPLAB IPE �g�����j�@'17/05/26
�@�@���{���̎��т́AMPLAB IPE v3.40�@MPLAB X IDE v3.40�@PICkit3 �@Windows10�ł���
�@�@�@�R���p�C�����Ă���PIC�ɏ������ނȂ� MPLAB X IDE �ōs���悢�B�������A�o���オ��
�@�@�Ă���A�܂��͓��肵��HEX�t�@�C���̏������݂͂ǂ�ȕ��@�ōs�����H
�@�@�c�O�Ȃ��� MPLAB X IDE �ł͂ł��܂���B
�@�@�@���� MPLAB IPE (Integrated Programmer Environment)���g�����Ƃɂ��܂����B���̕��@��
�@�@�Ȍ��ɐ������܂��B
�@�@�@�EMPLAB X IDE ���C���X�g�[���������� MPLAB IPE ���C���X�g�[�����Ă��Ȃ���A
�@�@�@�@������C���X�g�[������B
�@�@�@�EMPLAB IPE ���N��
�@�@�@�@�@������IPE�̉�ʂ̏c���������Ď��̓����t�����1366x768�ł��肬��B
�@�@�@�@�@�O�t���t�����1280x1024���Ɨ]�T���聄
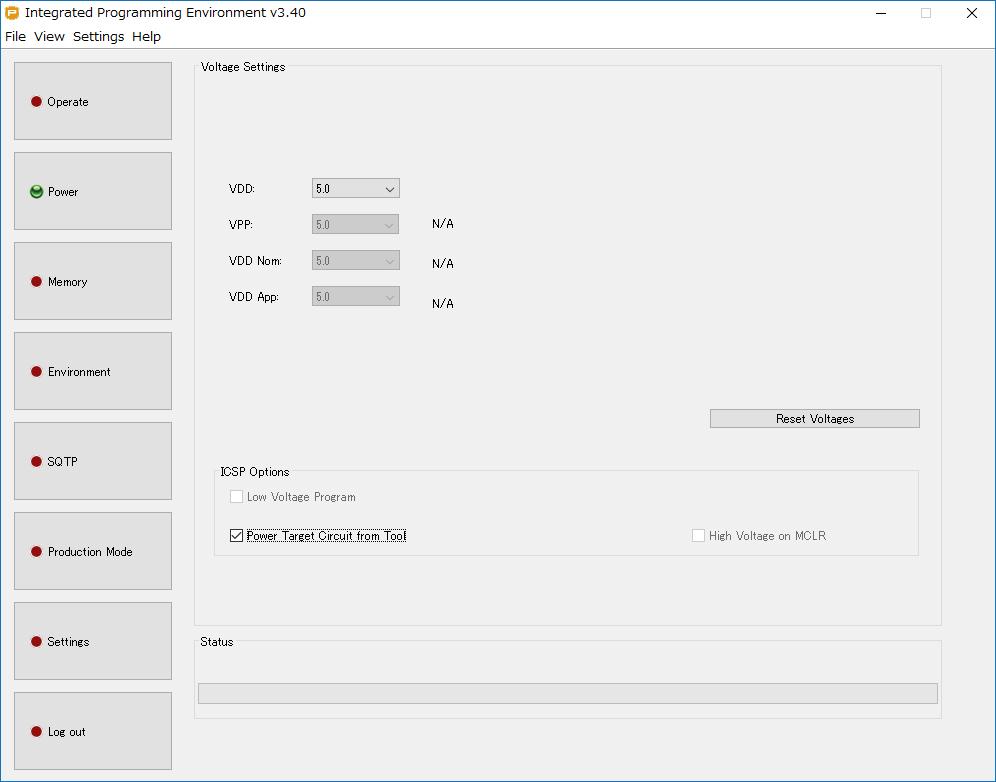
�@�@�@�E�f�o�C�X�iPIC�j��PICkit3�o�R�ł̓d��������ݒ�
�@�@�@�@�@���j���[�o�[�@Setting�@���@Advanced Mode�@���@�p�X���[�h�� microchip
�@�@�@�@�@���@���Ƀ��j���[�������
�@�@�@�@�@���@Power
�@�@�@�@�@���@���̉�ʗ�̂悤�Ɂ@�d����I���i�����PIC18F25K22�̏ꍇ��5.0V�j���A
�@�@�@�@�@�@�@ Power Target Circuit from Tool�@�Ƀ`�F�b�N
�@�@�@�@�@�@�@ �@�@�@�@�@���@Log out�@���@���C�����
�@�@�@�E�f�o�C�X��I���@���@Apply
�@�@�@�EPICkit3��USB��}���@���@Tools��PICkit3��I���@���@Connect
�@�@�@�ESource �̉E�[�� Brows�@���@�������݂���HEX�t�@�C�����w��@���@Program
�@�@�@�@�@�@�Q�l�@HEX�t�@�C���̑��ݏꏊ�iMPLAb x IDE�@�̏ꍇ�j
�@�@�@�@�@�@�@�@�@�@�@�F /�v���W�F�N�g�E�f�B���N�g��/dist/default/production/
�@�@�@�@�@�@�Q�l�@������d�������������̊m�F��ʂ��o��ꍇ������
�@�@�@�@�������݂ƃx���t�@�C������ɍs��ꂽ���b�Z�[�W���m�F���I���B
�@�@�@IPE�ɂ͔��ɑ����̋@�\������悤�ł����A��Ŏg���̂͏�L�{�����x�ł��傤�B����
�@�@�ł��Ȃ��{�^����ݒ�͐G��Ȃ����ƁB�i�o���ɖ߂��ݒ肪����Ƃ�����ł����ˁj
�@�@�@IPE���g���ق��ɁAPICkit 3 Programmer App and Scripting Tool v3.10 �������Ă݂܂���
�@�@��PICkit3��OS��g�ݍ��ނ悤�ɂƂ̃��b�Z�[�W���o�āA�|���Ȃ��Ē��~���܂����B
�@�@�Q�l����18���������~�������ƂɈ��g���܂����B
�@�@�@PICkit 3 Stand Alone Programmer App v1.0 ���g�����Ƃ��܂������A����̋N�����ɃG���[
�@�@���o�Ă��߂ł����B������͉ߓn���̃c�[���̂悤�Ɏv���܂��B
�@�@�@�{���͎Q�l����16�A17�A18�����Ȃ���������L�q���܂����B
22�DPIC�̒����d��/�ȓd�͂̕��@�@'17/08/29
�@�@�{�e�[�}�ɂ��Ă͑����̎����i�Q�l����19�A20�Ȃǁj������܂����A�L�q�͈͂��L������
������ɂ����ʂ�����A����PIC���g�p����͈͂ɂ����ė��ӂ��ׂ��|�C���g�ɂ��āA���̗v�_
���܂Ƃ߂܂����B
�@�@
�@���@�d���d���͂Ȃ�ׂ��Ⴍ����B
�@�@�@�@���z�̓��[�J�[���ۏ���Œ�d���߂��A�܂��͎��ȐӔC�ł̒�d���B
�@���@�d�����M�����[�^�͂Ȃ�ׂ��g��Ȃ��B
�@�@�@�@�g���ꍇ�͏���d����h���b�v�d�������Ȃ����̂��g���B
�@��L���A����PIC�Ɍ��炸LED�i�����_�C�I�[�h�j���R�Ȃǂ̃p�[�c�ނ��܂ߓd�q�@���ʓI��
�@�����邱�ƁB
�@���L��PIC�Ɍ��炸MCU��ʂɌ����邱�ƁB
�@���@�N���b�N���g���͂Ȃ�ׂ��Ⴍ�v����B
�@���@�d���d�����ቺ�����ꍇ�̎������Z�b�g(BOR�FBrown-out Reset�@)�@�\�͂ނ�݂Ɏg��Ȃ��B
�@���@�g�p���Ȃ�I/O�s��
�@�@�@�@�o�̓��[�h�Ƃ��A�l��0�iLow�j�ɂ��Ă����B
�@���@���̓��[�h��I/O�s��
�@�@�@�@�v���A�b�v���Ă����B�i�g�����ɂ���Ă͊O������v���_�E�����Ă����j
�@�@�@�@���̂悤�ȏꍇ�́A�v���A�b�v�̃_�C�i�~�b�N�Ȑؑւ𗘗p����Əȓd�͉��ł���B
�@�@�@�@�E�v���A�b�v���Ă����āA�X�C�b�`�ɂ��ڒn����ڒn�Ńv���O�����̗�����ւ���
�@�@�@�@�@�悤�ȏꍇ�A�ڒn���ǂ����̔����A
�@�@�@�@�@�@�@�ڒn�Ȃ�v���A�b�v���~�߁A
�@�@�@�@�@�@�@�ڒn�łȂ��Ȃ炻�̂܂܃v���A�b�v���Ă���
�@�@�@�@�@�悤�ɂ���Ζ��ʂȃv���A�b�v�d����ђʓd���i�P�ł��O�ł��Ȃ��Ƃ��ɗ����d���j
�@�@�@�@�@���Ȃ�����B
�@�@�@�@�E�����{�^���̒������肷��v���O�����̏ꍇ�A
�@�@�@�@�@�ڒn����Ă���Ԃ̃��[�v�̒����A
�@�@�@�@�@�@�@�v���A�b�v���~����;
�@�@�@�@�@�@�@�J�E���^�[up���߂ȂǁG
�@�@�@�@�@�@�@�f�B���C���߁i�Ⴆ��200ms);
�@�@�@�@�@�@�@�v���A�b�v�J�n����;
�@�@�@�@�@�@�@���[�v�ɖ߂閽�߁G
�@�@�@�@�@�̂悤�ɒ��߂̃f�B���C�����Ă����ƁA�v���A�b�v�d���i�̍��v�l�j��啝�ɏ��Ȃ�
�@�@�@�@�@�ł���B
�@�@�@�@�E�v���A�b�v������^���Ȃ����_�C�i�~�b�N�ɐ�ւ���v���O�����ŁA�v���A�b�v�ł�
�@�@�@�@�@�Ȃ��P�[�X������ꍇ�A
�@�@�@�@�@�@�@�O�������R�������ó��v���A�b�v���v���_�E��������
�@�@�@�@�@�Ɩ��ʂȊђʓd���i�P�ł��O�ł��Ȃ��Ƃ��ɗ����d���j���Ȃ�����B
�@�@�@�@
�@���@�o�̓��[�h��I/O�s��
�@�@�@�@��ʓI�ɂ͒l��0�iLow�j�Ƃ��Ă����B
�@�@�@�@�ڑ�����Ă��鑊��ɂ���Ă͂P�ihigh�j���]�܂����ꍇ�i���� LCD �̈�ځj������
�@�@�@�@���A�t�ɕK���O�ilow�j�ɂ��Ă����ׂ��ꍇ�i���� LCD �̓�ځj������B
�@���@�t���L�����N�^�[�f�B�X�v���C�iLCD�j���g�p����ꍇ�̗��ӓ_
�@�@�@�@�i�����̐�����SC1602�n�̏ꍇ�����A��ʓI�Ɍ����邱�Ƃ�������Ȃ��j
�@�@�@�ELCD���Ńf�[�^���i���b�`�j���I��������_�ŁAPIC���̃v���O������DB4(DB0)�`
�@�@�@�@DB7�s�����@high�@�ɐݒ肵�������]�܂����B���R��LCD���̓��̓s�����v���A�b�v�����
�@�@�@�@����̂ŁAPIC���� low �̕����v���A�b�v�d�������邩��B�i�Q�l����21�j
�@�@�@�@����͑��肪LCD�Ɍ��炸MCU������̏ꍇ�����l�Ɍ����邱�ƁB
�@�@�@�ELCD��VDD�[�q�̓d�����I�t�ɂȂ��Ă���Ƃ��A���͐M���������Ă��Ȃ����ƁB�i�Q�l
�@�@�@�@����22�j
�@�@�@�@�@PIC���X���[�v�i�p���[�_�E�����[�h�j�ɓ���������LCD��ʂ������ďȓd�͂���悤��
�@�@�@�@�@�ꍇ�ŁALCD�ւ̓d���������_�C�i�~�b�N�ɐ�ւ������P�[�X�B
�@�@�@�@�@�@�@�Z LCD��VDD�[�q�̓d�����I���ɂ���O�́ALCD�ւ̂��ׂẴs���� low �ł��邱�ƁB
�@�@�@�@�@�@�@�Z LCD��VDD�[�q�̓d�����I���ɂ��Ă���LCD�����������邱�ƁB
�@�@�@�@�@�@�@�� LCD�ւ̂��ׂẴs���� low �ɂ��Ă���LCD��VDD�[�q�̓d�����I�t�ɂ��A�X��
�@�@�@�@�@�@�@�@ �[�v�����邱�ƁB
�@�@�@�@�@�@�@�� wake-up�������_�ł́A�܂�LCD��VDD�[�q�̓d�����I���ɂ��Ă���LCD����������
�@�@�@�@�@�@�@�@ �邱�ƁB
�@�@�@�@�@�@�i���s�k�Fhigh �̃s��������܂܂�LCD��VDD�[�q�̓d�����I�t�ɂ�����APIC���v��
�@�@�@�@�@�@�@70mA���̓d�����Ȃ��ꂽ�܂܃X���[�v�����j
�@
�@�@�@�ELCD��VDD�d����4.5V���x�ȉ��Őv����ƁALCD��Vo�[�q��ڒn���邾���Ŏ��p��\����
�@�@�@�@�R���g���X�g�������A�R���g���X�g�����p�̃{�����[���������d�����Ȃ�����B
�@���@�X���[�v�@�\�i�p���[�_�E�����[�h�j�̗��p
�@�@�@�@��L�̐ߓd���@�����p���邱�Ƃɂ��X���[�v�@�\����������B
�Q�l����
�P�@air variable�@�̂���d�q�H�삪�D���Ȏ�́`�@���@�����̂o�h�b�ŋ��J����
�Q�@�ؑ��ɗT�@�`�d�q�H��(PIC,Arduino,AVR)��M�̂��������T�C�g
�@�@�@�@PIC�S�ʂ́@���@�}�C�R��
�@�@�@�@�����ɂ��Ắ@���@�g�pPIC�@���@PIC�̓�����������͂�����
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@���@�^�C�}�[�������g����LED��_��
�R�@������́@�ЂƂ�Ń}�C�R�����E�E�E�@���o�h�b�}�C�R���@���q�r�|�Q�R�Q�b�ʐM�P�A�Q
�S�@Microchip�Ё@PIC16F88 Data sheet
�T�@Microchip�Ё@PIC24Family Data sheet
�U�@���Җ��s���@�i�c�l�v���O���}�łP�Q�e�U�Q�X/�U�V�T�ɍď������݂ł��Ȃ����
�V�@Microchip�Ё@MPLAB_XC8_C_Compiler_User_Guide.pdf
�W�@Microchip�Ё@PIC18F2x_4xk22.pdf
�X�@Microchip�Ё@PIC16F193X.pdf
10�@���{�X�p���V����������� Spansion Inc. ���T�|�[�g��Microcontrollers
�@�@�@�@�@�@�@�@�@�@�@���J���ɓ������Ẵm�E�n�E��EMC�v(�m�C�Y��)���\�t�g�E�G�A��
11�@Tera Term �v���W�F�N�g�@Tera Term
12�@�㓡 �a�d���@Stirling
13�@�c�[���E���{����@PIC18�n�}�C�R����EEPROM�����݁EADC�Ȃǎ��Ӌ@�\�����삵�Ȃ����̉������@
14�@Microchip�Ё@MPLAB XC Compilers
15�@fudist����@Shift_JIS�̃_������
16�@Sahara's WebLog�@MPLAB X IPE �̐ݒ�
17�@Microchip�Ё@MPLAB IPE ���[�U�K�C�h
18�@air variable�@PICkit3��PICkit3�X�v���N�e�B���O�c�[�����ɂ���A�v���P�[�V�����𗘗p���ď������ގ��̒���
19�@Microchip�Ё@�����d�͐v�K�C�h
20�@��� �N��@�ȓd�͉��m�E�n�E
21�@���� �r�Y�@�t�����W���[�� (SC1602)�̐���\�t�g������@��4.1��
22�@JM1GAD's Home Page�@SC1602 LCD���W���[�� (HD44780�R���p�`�u��) �̎g�����@�̒��̎Q�l�����@�O���� �A�v���P�[�V�����m�[�gpdf�@��15.���@�L
�@�@�@�@�@���@Log out�@���@���C�����
�@�@�@�E�f�o�C�X��I���@���@Apply
�@�@�@�EPICkit3��USB��}���@���@Tools��PICkit3��I���@���@Connect
�@�@�@�ESource �̉E�[�� Brows�@���@�������݂���HEX�t�@�C�����w��@���@Program
�@�@�@�@�@�@�Q�l�@HEX�t�@�C���̑��ݏꏊ�iMPLAb x IDE�@�̏ꍇ�j
�@�@�@�@�@�@�@�@�@�@�@�F /�v���W�F�N�g�E�f�B���N�g��/dist/default/production/
�@�@�@�@�@�@�Q�l�@������d�������������̊m�F��ʂ��o��ꍇ������
�@�@�@�@�������݂ƃx���t�@�C������ɍs��ꂽ���b�Z�[�W���m�F���I���B
�@�@�@IPE�ɂ͔��ɑ����̋@�\������悤�ł����A��Ŏg���̂͏�L�{�����x�ł��傤�B����
�@�@�ł��Ȃ��{�^����ݒ�͐G��Ȃ����ƁB�i�o���ɖ߂��ݒ肪����Ƃ�����ł����ˁj
�@�@�@IPE���g���ق��ɁAPICkit 3 Programmer App and Scripting Tool v3.10 �������Ă݂܂���
�@�@��PICkit3��OS��g�ݍ��ނ悤�ɂƂ̃��b�Z�[�W���o�āA�|���Ȃ��Ē��~���܂����B
�@�@�Q�l����18���������~�������ƂɈ��g���܂����B
�@�@�@PICkit 3 Stand Alone Programmer App v1.0 ���g�����Ƃ��܂������A����̋N�����ɃG���[
�@�@���o�Ă��߂ł����B������͉ߓn���̃c�[���̂悤�Ɏv���܂��B
�@�@�@�{���͎Q�l����16�A17�A18�����Ȃ���������L�q���܂����B
22�DPIC�̒����d��/�ȓd�͂̕��@�@'17/08/29
�@�@�{�e�[�}�ɂ��Ă͑����̎����i�Q�l����19�A20�Ȃǁj������܂����A�L�q�͈͂��L������
������ɂ����ʂ�����A����PIC���g�p����͈͂ɂ����ė��ӂ��ׂ��|�C���g�ɂ��āA���̗v�_
���܂Ƃ߂܂����B
�@�@
�@���@�d���d���͂Ȃ�ׂ��Ⴍ����B
�@�@�@�@���z�̓��[�J�[���ۏ���Œ�d���߂��A�܂��͎��ȐӔC�ł̒�d���B
�@���@�d�����M�����[�^�͂Ȃ�ׂ��g��Ȃ��B
�@�@�@�@�g���ꍇ�͏���d����h���b�v�d�������Ȃ����̂��g���B
�@��L���A����PIC�Ɍ��炸LED�i�����_�C�I�[�h�j���R�Ȃǂ̃p�[�c�ނ��܂ߓd�q�@���ʓI��
�@�����邱�ƁB
�@���L��PIC�Ɍ��炸MCU��ʂɌ����邱�ƁB
�@���@�N���b�N���g���͂Ȃ�ׂ��Ⴍ�v����B
�@���@�d���d�����ቺ�����ꍇ�̎������Z�b�g(BOR�FBrown-out Reset�@)�@�\�͂ނ�݂Ɏg��Ȃ��B
�@���@�g�p���Ȃ�I/O�s��
�@�@�@�@�o�̓��[�h�Ƃ��A�l��0�iLow�j�ɂ��Ă����B
�@���@���̓��[�h��I/O�s��
�@�@�@�@�v���A�b�v���Ă����B�i�g�����ɂ���Ă͊O������v���_�E�����Ă����j
�@�@�@�@���̂悤�ȏꍇ�́A�v���A�b�v�̃_�C�i�~�b�N�Ȑؑւ𗘗p����Əȓd�͉��ł���B
�@�@�@�@�E�v���A�b�v���Ă����āA�X�C�b�`�ɂ��ڒn����ڒn�Ńv���O�����̗�����ւ���
�@�@�@�@�@�悤�ȏꍇ�A�ڒn���ǂ����̔����A
�@�@�@�@�@�@�@�ڒn�Ȃ�v���A�b�v���~�߁A
�@�@�@�@�@�@�@�ڒn�łȂ��Ȃ炻�̂܂܃v���A�b�v���Ă���
�@�@�@�@�@�悤�ɂ���Ζ��ʂȃv���A�b�v�d����ђʓd���i�P�ł��O�ł��Ȃ��Ƃ��ɗ����d���j
�@�@�@�@�@���Ȃ�����B
�@�@�@�@�E�����{�^���̒������肷��v���O�����̏ꍇ�A
�@�@�@�@�@�ڒn����Ă���Ԃ̃��[�v�̒����A
�@�@�@�@�@�@�@�v���A�b�v���~����;
�@�@�@�@�@�@�@�J�E���^�[up���߂ȂǁG
�@�@�@�@�@�@�@�f�B���C���߁i�Ⴆ��200ms);
�@�@�@�@�@�@�@�v���A�b�v�J�n����;
�@�@�@�@�@�@�@���[�v�ɖ߂閽�߁G
�@�@�@�@�@�̂悤�ɒ��߂̃f�B���C�����Ă����ƁA�v���A�b�v�d���i�̍��v�l�j��啝�ɏ��Ȃ�
�@�@�@�@�@�ł���B
�@�@�@�@�E�v���A�b�v������^���Ȃ����_�C�i�~�b�N�ɐ�ւ���v���O�����ŁA�v���A�b�v�ł�
�@�@�@�@�@�Ȃ��P�[�X������ꍇ�A
�@�@�@�@�@�@�@�O�������R�������ó��v���A�b�v���v���_�E��������
�@�@�@�@�@�Ɩ��ʂȊђʓd���i�P�ł��O�ł��Ȃ��Ƃ��ɗ����d���j���Ȃ�����B
�@�@�@�@
�@���@�o�̓��[�h��I/O�s��
�@�@�@�@��ʓI�ɂ͒l��0�iLow�j�Ƃ��Ă����B
�@�@�@�@�ڑ�����Ă��鑊��ɂ���Ă͂P�ihigh�j���]�܂����ꍇ�i���� LCD �̈�ځj������
�@�@�@�@���A�t�ɕK���O�ilow�j�ɂ��Ă����ׂ��ꍇ�i���� LCD �̓�ځj������B
�@���@�t���L�����N�^�[�f�B�X�v���C�iLCD�j���g�p����ꍇ�̗��ӓ_
�@�@�@�@�i�����̐�����SC1602�n�̏ꍇ�����A��ʓI�Ɍ����邱�Ƃ�������Ȃ��j
�@�@�@�ELCD���Ńf�[�^���i���b�`�j���I��������_�ŁAPIC���̃v���O������DB4(DB0)�`
�@�@�@�@DB7�s�����@high�@�ɐݒ肵�������]�܂����B���R��LCD���̓��̓s�����v���A�b�v�����
�@�@�@�@����̂ŁAPIC���� low �̕����v���A�b�v�d�������邩��B�i�Q�l����21�j
�@�@�@�@����͑��肪LCD�Ɍ��炸MCU������̏ꍇ�����l�Ɍ����邱�ƁB
�@�@�@�ELCD��VDD�[�q�̓d�����I�t�ɂȂ��Ă���Ƃ��A���͐M���������Ă��Ȃ����ƁB�i�Q�l
�@�@�@�@����22�j
�@�@�@�@�@PIC���X���[�v�i�p���[�_�E�����[�h�j�ɓ���������LCD��ʂ������ďȓd�͂���悤��
�@�@�@�@�@�ꍇ�ŁALCD�ւ̓d���������_�C�i�~�b�N�ɐ�ւ������P�[�X�B
�@�@�@�@�@�@�@�Z LCD��VDD�[�q�̓d�����I���ɂ���O�́ALCD�ւ̂��ׂẴs���� low �ł��邱�ƁB
�@�@�@�@�@�@�@�Z LCD��VDD�[�q�̓d�����I���ɂ��Ă���LCD�����������邱�ƁB
�@�@�@�@�@�@�@�� LCD�ւ̂��ׂẴs���� low �ɂ��Ă���LCD��VDD�[�q�̓d�����I�t�ɂ��A�X��
�@�@�@�@�@�@�@�@ �[�v�����邱�ƁB
�@�@�@�@�@�@�@�� wake-up�������_�ł́A�܂�LCD��VDD�[�q�̓d�����I���ɂ��Ă���LCD����������
�@�@�@�@�@�@�@�@ �邱�ƁB
�@�@�@�@�@�@�i���s�k�Fhigh �̃s��������܂܂�LCD��VDD�[�q�̓d�����I�t�ɂ�����APIC���v��
�@�@�@�@�@�@�@70mA���̓d�����Ȃ��ꂽ�܂܃X���[�v�����j
�@
�@�@�@�ELCD��VDD�d����4.5V���x�ȉ��Őv����ƁALCD��Vo�[�q��ڒn���邾���Ŏ��p��\����
�@�@�@�@�R���g���X�g�������A�R���g���X�g�����p�̃{�����[���������d�����Ȃ�����B
�@���@�X���[�v�@�\�i�p���[�_�E�����[�h�j�̗��p
�@�@�@�@��L�̐ߓd���@�����p���邱�Ƃɂ��X���[�v�@�\����������B
�Q�l����
�P�@air variable�@�̂���d�q�H�삪�D���Ȏ�́`�@���@�����̂o�h�b�ŋ��J����
�Q�@�ؑ��ɗT�@�`�d�q�H��(PIC,Arduino,AVR)��M�̂��������T�C�g
�@�@�@�@PIC�S�ʂ́@���@�}�C�R��
�@�@�@�@�����ɂ��Ắ@���@�g�pPIC�@���@PIC�̓�����������͂�����
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@���@�^�C�}�[�������g����LED��_��
�R�@������́@�ЂƂ�Ń}�C�R�����E�E�E�@���o�h�b�}�C�R���@���q�r�|�Q�R�Q�b�ʐM�P�A�Q
�S�@Microchip�Ё@PIC16F88 Data sheet
�T�@Microchip�Ё@PIC24Family Data sheet
�U�@���Җ��s���@�i�c�l�v���O���}�łP�Q�e�U�Q�X/�U�V�T�ɍď������݂ł��Ȃ����
�V�@Microchip�Ё@MPLAB_XC8_C_Compiler_User_Guide.pdf
�W�@Microchip�Ё@PIC18F2x_4xk22.pdf
�X�@Microchip�Ё@PIC16F193X.pdf
10�@���{�X�p���V����������� Spansion Inc. ���T�|�[�g��Microcontrollers
�@�@�@�@�@�@�@�@�@�@�@���J���ɓ������Ẵm�E�n�E��EMC�v(�m�C�Y��)���\�t�g�E�G�A��
11�@Tera Term �v���W�F�N�g�@Tera Term
12�@�㓡 �a�d���@Stirling
13�@�c�[���E���{����@PIC18�n�}�C�R����EEPROM�����݁EADC�Ȃǎ��Ӌ@�\�����삵�Ȃ����̉������@
14�@Microchip�Ё@MPLAB XC Compilers
15�@fudist����@Shift_JIS�̃_������
16�@Sahara's WebLog�@MPLAB X IPE �̐ݒ�
17�@Microchip�Ё@MPLAB IPE ���[�U�K�C�h
18�@air variable�@PICkit3��PICkit3�X�v���N�e�B���O�c�[�����ɂ���A�v���P�[�V�����𗘗p���ď������ގ��̒���
19�@Microchip�Ё@�����d�͐v�K�C�h
20�@��� �N��@�ȓd�͉��m�E�n�E
21�@���� �r�Y�@�t�����W���[�� (SC1602)�̐���\�t�g������@��4.1��
22�@JM1GAD's Home Page�@SC1602 LCD���W���[�� (HD44780�R���p�`�u��) �̎g�����@�̒��̎Q�l�����@�O���� �A�v���P�[�V�����m�[�gpdf�@��15.���@�L